
DonkeyCar(ロバ車) Part2:トレーニングデータの構築、調整、および生成

これは、ロバ車の3部構成シリーズのパート2です。これがパート1とパート3です。ではパート1、私は私の新しいドンキーカーが稼働してラズベリーパイに基づいて、カメラの接続作業を持ってしまったかについて話しました。カメラをRPi Cam Web Interfaceでテストし、家の1階を走り回って車の感触と操作方法を確認しました。

このモードでは、PiはWebサーバーの背後にある携帯カメラであり、Webページにビデオ画像を送信していました。RCカーは、同梱されている2.4 Ghzコントローラーによって完全に制御されていました。RPi Cam Web Interfaceソフトウェアを実行するには、Piでターミナルを開き、githubサイトからコードをダウンロードしました。次に、Webサーバーを起動するstartup.shスクリプトを実行しました。
カメラで画像がキャプチャされてから、Webページで目の前に表示されるまでにどのくらいの遅延があるのか興味がありました。遅れは無視できたので、ウェブページの画像を見るだけで車を運転できました。これは、カメラとPi間の入出力が高速であり、WiFiチップを介したWebブラウザーへの画像の変換が高速であることを意味しました。基本的に、リアルタイムのリモートビデオドライビングを行うのに十分な馬力がPiにあることが証明されました。
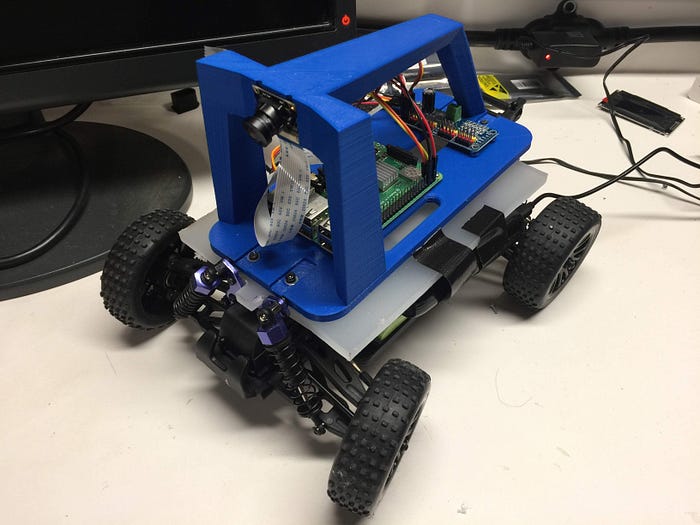
次に、RCカーに付属の2.4GHzレシーバーからコネクターを取り外し、Amazonに注文したサーボコントローラーに接続を移動しました。このサーボコントローラーボードは最大16個のサーボを制御するように設計されていますが、必要なサーボは2つだけです。1回はスピードのため、もう1回は車の回転のためです。また、サーボコントローラーからPi 40ピンGPIOバスに4本のワイヤーを接続する必要がありました。これらの接続の写真は次のとおりです。

次のステップは、ステアリングと加速度計のキャリブレーションです。これを行うには、PiにSSH接続してキャリブレーションを実行する必要がありました。Electronic Speed Controller(ESC)の多くは少し異なるため、このプロセスは少し注意が必要です。こちらのロバカーサイトに文書化されています。私の「STOP」周波数が正しくないため、車を後進させることができないようです。最終的な結果は、スロットルのパラメーターと車のステアリングをエンコードする構成ファイルです。
これが完了したら、テストトラックを回る準備ができました。妻の悔しさの多くに、私は地下の家具を部屋の片側に移動し、地下の床に白い電気テープを置いた。床にクールなエポキシコーティングを施しましたが、白いテープのコントラストは良好でした。

また、床のライトの多くの反射を見ることができます。トレーニングプロセスでは、光の反射を無視し、床の白いテープにのみ「注意」をすることを学ばなければなりません。注意は、ディープラーニングの重要な概念です。
次に、壁のプラグからPiを取り外し、Amazonで購入した新しい6800 mAHパワーパックを使用して電源を入れました。プラットフォームの下にパワーパックを固定するためにテープを使用しました。ESCからのGNDおよびVCCワイヤは、RCカーで使用される2.4GHzレシーバーのデジタル回路に電力を供給することに注意してください。ただし、この電流はPiに電力を供給するのに十分ではありません。テストとして、Piの実行中にUSP電流計を車に接続しました。結果は下の写真にあります:

トレーニングデータの生成
車をすべて組み立てたら、トレーニングデータセットを生成する準備ができています。次に、PiにSSHを実行し、ドライブプログラムを起動しました。
$ python manage.pyドライブ
これは、カメラの内容を表示するWebサーバーを起動するpythonプログラムであり、トレーニングセットをキャプチャするためのコントロールも提供します。ドライブプログラムが実行されたら、任意のWebブラウザーに移動し、ポート8887を使用して車のIPアドレスを入力できます。今度は難しい部分です。トレーニングセットを作成するには、トラックを10回運転しなければなりませんでした!
問題は、キーボードのキーで車を制御することはできましたが、操縦するのが非常に困難だったことです。また、Webインターフェースの「ポインター」を試しましたが、操縦するのも困難でした。最後に、携帯電話を取り出して、電話のブラウザーでドンキーカーのWebページを表示しました。Webブラウザーは、スマートフォンの前方および側方の傾きを検出するのに十分なほどスマートであり、これを速度と回転に変換します。非常に賢い!約1時間の練習で、コースを回ることができました。その後、「記録開始」を押して、約10周後に「記録停止」を押しました。これが完了したら、Donkey CarにSSHで接続し、ディレクトリを「tub」フォルダーに変更しました。そのフォルダーには、約30Kの.jpgおよび.jsonファイルがありました。各JSONファイルには、画像への参照、タイムスタンプ、および浮動小数点数としての加速とステアリングがありました。これはトレーニングデータです。
JSONファイルのサンプルは次のとおりです。
{
「user / angle」:0.18989955357142868、
「user / throttle」:0.7175781250000001、
「user / mode」:「user」、
「cam / image_array」:「1000_cam-image_array_.jpg」、
「timestamp」:「2019–01– 05 17:09:35.184483”
}
そのJSONファイルに対応する画像を次に示します。

その後、トレーニングのためにドンキーカーからラップトップに画像をコピーしました。これについてはパート3で説明します。